










In this article, we will cover the basic principles behind GNSS positioning and GNSS corrections. For a technical overview of GNSS technology, refer to our blog What is GNSS Positioning?
Executive Summary
What is GNSS?
- GNSS (Global Navigation Satellite System) refers to satellite systems providing global positioning.
- GPS is a subset of GNSS, developed by the United States, but GNSS encompasses all such systems.
How GNSS Works
- Satellites transmit orbital and timing data; GNSS receivers use these to calculate positions using signals from at least four satellites.
- Accuracy depends on reference frames (e.g., ITRF) and GNSS signal frequencies (e.g., L1, L2, L5).
GNSS Limitations
- Accuracy: Standard GNSS has a positioning error of 5–10 meters due to atmospheric delays, satellite orbit shifts, and multipath effects.
- Indoor Usage: Signals are blocked or reflected indoors, leading to poor performance.
GNSS Corrections
- Corrections improve GNSS accuracy to as little as 2 cm by mitigating atmospheric and signal errors.
- Used in high-precision applications like autonomous vehicles, robotics, construction, GIS mapping, and last-mile delivery.
Correction Methods
- DGNSS: Uses nearby reference stations for sub-meter accuracy.
- SBAS: Free, region-specific services (e.g., WAAS, EGNOS) providing ~2.5-meter accuracy.
- RTK: Achieves centimeter accuracy with nearby base stations and carrier phase corrections.
- PPP: High accuracy using satellite data but with longer convergence times.
- PPP-RTK: Combines PPP and RTK for fast, precise corrections with reduced convergence time.
Data Transmission
- Corrections are sent via cellular networks, L-band frequencies (satellite), or radio transmissions depending on infrastructure and range needs.
Data Representation
- OSR: Combines correction data into a single value (used in RTK).
- SSR: Separates error sources (e.g., clock, orbit) for scalable, precise corrections (used in PPP and PPP-RTK).
What is GNSS?
Global Navigation Satellite Systems (GNSS) refers to any satellite constellation that provides global positioning, navigation, and timing services. The most well-known systems include the United States’ GPS, Russia’s GLONASS, the EU’s Galileo, and China’s BeiDou.
What is the difference between GPS and GNSS?
GPS and GNSS are both satellite navigation systems, but GNSS includes all systems worldwide, while GPS refers specifically to the U.S. system. GNSS (Global Navigation Satellite Systems) is an umbrella term that encompasses all satellite-based positioning systems used worldwide. GPS (Global Positioning System), on the other hand, specifically refers to the satellite navigation system which is owned by the United States government and operated by the United States Space Force. While GPS is one type of GNSS system, other systems include Europe’s Galileo, Russia’s GLONASS, and China’s BeiDou.
Do GNSS constellations only work in their own country?
No, GNSS constellations are not restricted to working only within their own countries. While each GNSS constellation is developed and maintained by a specific country or group of countries, these systems are designed to be used anywhere on Earth.
How does GNSS work?
GNSS satellites orbit the earth transmitting coded signals containing two pieces of information: where they are in orbit and a stable timestamp from an onboard atomic clock. The time it takes for a signal to reach a GNSS receiver on Earth (the one in your cellphone or car, for example) lets it know how far it is from the satellite. To determine its position, the receiver needs to collect information from a minimum of four satellites. When the receiver knows the precise position of itself with respect to each satellite, it translates its own position into a three dimensional Earth-based coordinate system.
What are reference frames?
Reference frames are abstract coordinate systems used to precisely define the locations of points on the Earth’s surface and in space. These frames are essential for ensuring consistency and accuracy in positioning and navigation. The most widely used reference frame in GNSS is the International Terrestrial Reference Frame (ITRF) which defines a global cartesian (x,y,z) coordinate system that accounts for the movements of the Earth’s crust, including tectonic plate shifts, and provides a stable and consistent reference for GNSS data.
What are GNSS frequencies?
GNSS satellites transmit their signals at certain frequencies. These frequencies lie within the L-band of the radio spectrum (1-2 GHz). Subsections of the L-band used by GNSS are referred to as L1, L2 and L5, each of which offering its own balance of signal strength and atmospheric penetration.

Does GNSS work indoors?
No, GNSS positioning does not typically work indoors. Building materials like concrete, steel, and wood can block GNSS signals, preventing them from reaching the receiver. Signals that do penetrate buildings may be reflected off walls, floors, and other surfaces, causing multipath effects. This leads to inaccurate position calculations as the receiver may mistake reflected signals for direct ones.
How accurate is GNSS?
Standard GNSS receivers achieve an accuracy of 5 to 10 meters in an outdoor environment.
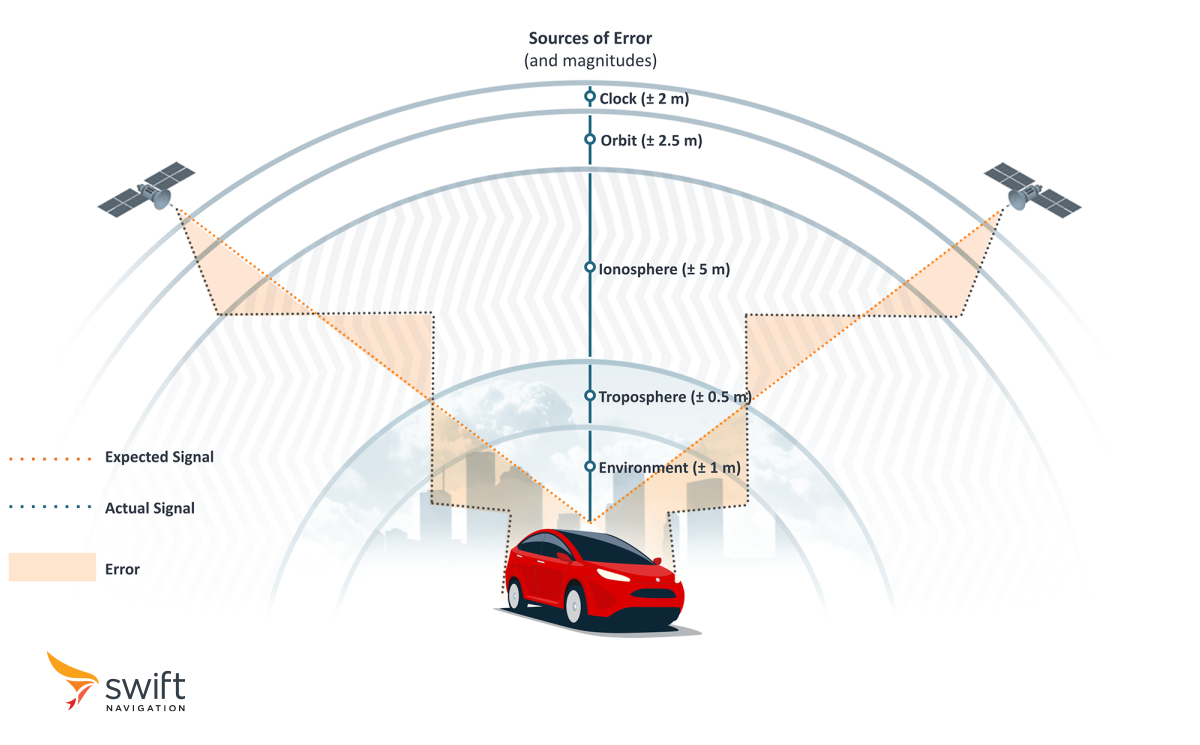
What causes GNSS errors?
GNSS systems are susceptible to various sources of errors that degrade the accuracy of positioning solutions. The largest source of error is caused by the Earth’s atmosphere as GNSS signals are slowed down and refracted as they pass through the ionosphere (outer layer) and troposphere (layer near the Earth’s surface). While very precise, atomic clocks onboard GNSS satellites are susceptible to slight deviations that affect the receiver’s calculated position. Similarly, satellite orbits can also deviate slightly from their documented paths. Lastly, in complex environments, GNSS receivers receive multiple copies of the same signal as it bounces off nearby objects such as buildings and trees, affecting its location calculation. These errors compound to an overall positioning error that ranges between 5 to 10 meters.
What are GNSS corrections?
GNSS corrections improve the accuracy, integrity, and reliability of positioning information obtained from GNSS systems by accounting for the various errors and applying them to the satellite signal being received on the ground, improving accuracy from 5-10 meters down to 2 cm.
What types of applications require GNSS corrections?
GNSS corrections are an essential prerequisite in any application requiring precise positioning.
Autonomous vehicles: GNSS corrections are a crucial sensor for safe navigation of self-driving cars and ADAS. Read our blog post to learn more about enhancing automotive safety through precision GNSS.
Outdoor robotics: GNSS corrections improve robot safety, navigation and enable features such as virtual geofencing which is essential in use cases such as robotic lawn mowers. Read our blog post to learn how we test the accuracy of GNSS solutions for outdoor robots.
Construction and utilities: GNSS corrections enable precise measurements of land and buildings which is important for accurate and safe construction planning. When mapping utilities, corrections are vital for safely locating and recording underground pipes and cables which prevents future damage and streamlines maintenance callouts. Read our case study to learn how Deutsche Telekom uses precise positioning to quickly and safely lay its fiber optics infrastructure.
GIS mapping: GNSS corrections bring affordable survey-grade precision to GIS processes such as utility pole mapping and urban vegetation management. Read our blog post to learn how to choose a precise positioning solution for your GIS project.
Delivery systems: With GNSS corrections, logistics companies can improve route optimization with lane-level navigation, ensuring accurate and timely delivery to the correct address. It also enables autonomous delivery via robots and drones with safe and precise navigation.
How do GNSS corrections work?
GNSS corrections typically rely on a single base station, or a network of Continuously Operating Reference Stations (CORS) which consist of high-quality GNSS receivers that continuously collect satellite data. Each station compares the observed satellite data with its known fixed position, thereby inferring the errors that also affect all receivers in its vicinity. Different correction methods employ various algorithms to determine what corrections to transmit to receivers in the field, which apply these to their own raw positioning data.
What are the different GNSS correction methods?
Different GNSS correction methods cater to varied requirements for accuracy, coverage, and reliability, depending on their application. For a more detailed overview on the various GNSS correction types, including underlying technology and common applications, read our blog What are the Different Types of GNSS Corrections?
DGNSS (Differential GNSS) improves positioning accuracy to the submeter level by using a reference station at a known location that compares its calculated position with its actual position. DGNSS applies relatively simple code corrections, which are adjustments made to the raw distance measurements derived from the timing code of GNSS signals. This renders it lightweight in terms of power and bandwidth consumption, making it suitable for a wide range of applications, including those with limited resources.
SBAS (Satellite Based Augmentation System) is a free correction service that uses a few ground stations globally to provide coarse corrections with an accuracy of around 2.5 meters. It is primarily used in aviation and is delivered through regional services such as WAAS in the United States, EGNOS in Europe, MSAS in Japan, and others. These systems enhance GNSS signals to ensure safe and reliable navigation for aircraft during critical phases like landing.
RTK (Real-Time Kinematic) also uses a nearby reference station but achieves centimeter-level accuracy by using both code corrections (like DGNSS) and carrier phase corrections. The latter involves measurements of the phase of the carrier wave of GNSS signals, which, due to their high frequency (~1.5 GHz), are significantly more precise than the code measurements, which have a much lower chip rate of about 1 MHz.
Network RTK uses the same principle as traditional RTK, except it utilizes a network of multiple base stations, often managed by a service provider, instead of a single station. This enables more accurate and reliable corrections over a larger area.
PPP (Precise Point Positioning) enhances positioning accuracy to the centimeter level by using precise satellite orbit and clock data. The method uses both code and carrier phase measurements to achieve high accuracy. However, it requires a long convergence time, often up to 30 minutes or more, to resolve the ambiguities in the carrier phase data. This extended convergence time is because PPP does not rely on a nearby reference station, instead depending on a global network of sparsely spaced reference stations for correction data.
PPP-RTK combines the strengths of both PPP and RTK to achieve centimeter-level accuracy with shorter convergence times. It uses precise satellite orbit and clock data like PPP, along with real-time atmospheric corrections and regional reference network data like RTK. This integration allows the system to quickly resolve carrier phase ambiguities and provide high-precision positioning without the prolonged convergence time typically associated with PPP alone, benefiting from the real-time data provided by the nearby regional reference stations.
How are GNSS corrections sent?
Regardless of the corrections service used, the device needs to receive the corrections. This is typically done in one of three ways:
Cellular Networks: This method leverages existing mobile communication infrastructure to provide real-time corrections to GNSS receivers. Cellular transmission is highly reliable in areas with good network coverage and allows for wide-area distribution of corrections.
L-band Frequencies: Some corrections services, like SBAS, use L-band frequencies to transmit correction data from geostationary satellites. L-band transmission is advantageous for its ability to cover large geographic areas, but does require line-of-sight with low elevation satellites
Radio Transmissions: GNSS corrections can also be sent via radio waves, typically using UHF (Ultra High Frequency) or VHF (Very High Frequency) bands. This method is commonly used when a local base station is in close proximity to the receiver.
What is RTCM?
Radio Technical Commission for Maritime Services (RTCM) defines the standardized message formats for transmitting GNSS correction data. These messages include various types of corrections that improve the accuracy of GNSS positioning.
What is NTRIP?
Networked Transport of RTCM via Internet Protocol (NTRIP) is a protocol used to stream GNSS correction data over the Internet. It facilitates the transmission of RTCM messages from base stations to GNSS receivers via HTTP/HTTPS.
What are OSR and SSR?
OSR and SSR are two different ways of representing corrections data.
OSR (Observation Space Representation) combines GNSS errors together into a single value per satellite and signal. It is typically used in RTK systems where corrections are derived from observations made by a nearby reference station and provided to the receiver.
SSR (State Space Representation) is a more advanced and scalable method that models each GNSS error source separately (e.g. clock, orbit, troposphere, ionosphere) at the server level, and broadcasts these to all the receivers in a given geographical area, who in turn are responsible for computing their own correction solution. SSR is typically used in PPP and PPP-RTK and is supported by the modern RTCM 3.x messaging format.