An Inertial Measurement Unit (IMU) is a sensor device that measures and reports a vehicle or device’s specific force (acceleration) and angular rate (rotation) along three orthogonal axes; typically X, Y, and Z. Most modern IMUs use Micro-Electro-Mechanical Systems (MEMS) technology to integrate three accelerometers and three gyroscopes, providing six degrees of freedom (6DoF) sensing. Some IMUs also include magnetometers for heading information.
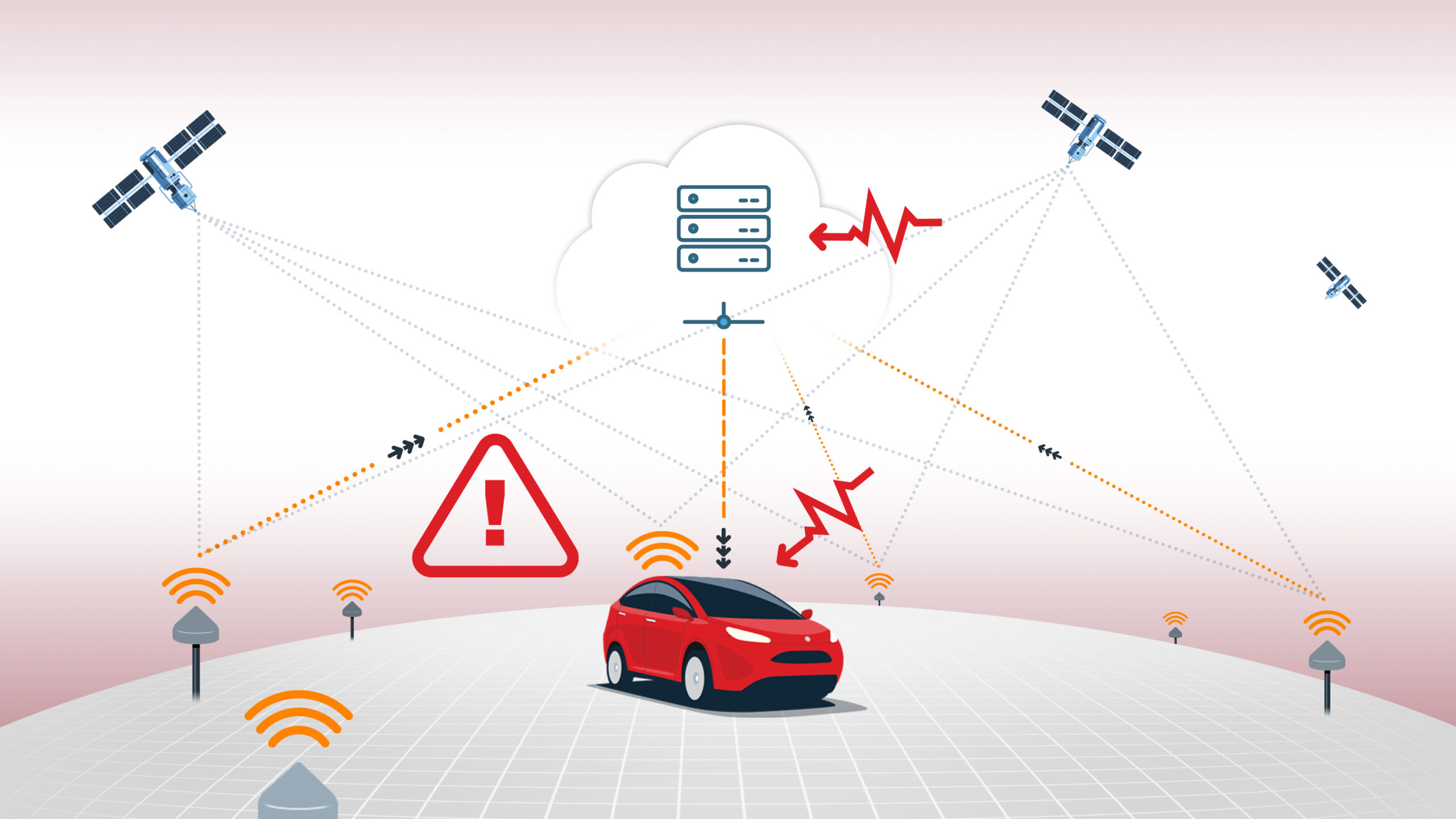
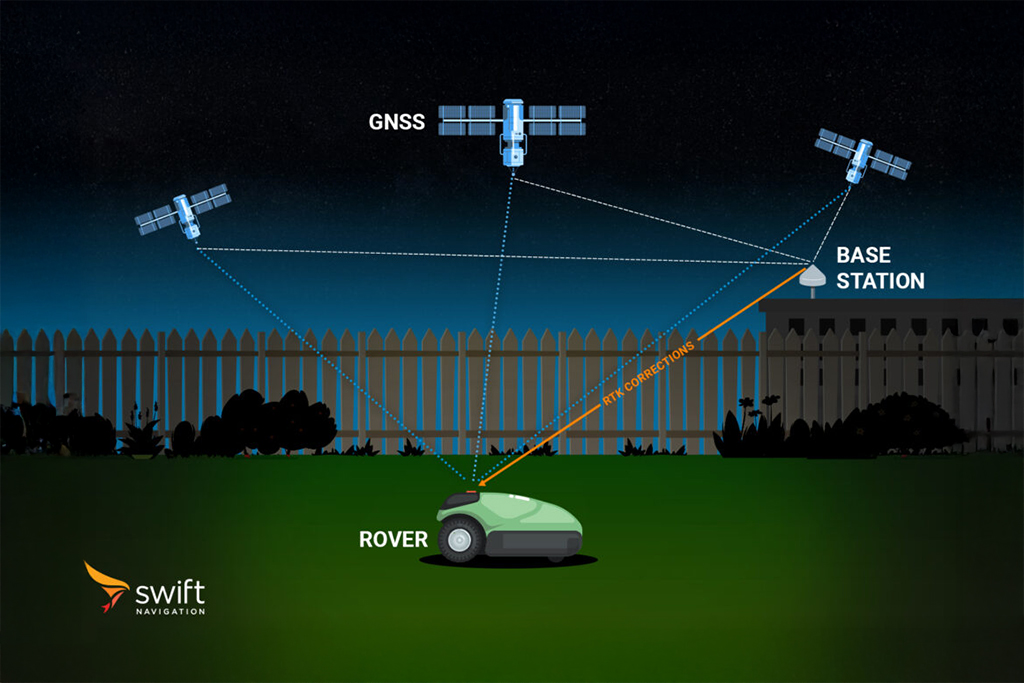
IMUs are a core component in navigation and positioning systems, especially in environments where Global Navigation Satellite System (GNSS) signals are unavailable or unreliable, such as tunnels, urban canyons, or during GNSS outages. By integrating acceleration and angular rate data over time, IMUs enable dead reckoning—estimating position, velocity, and orientation changes relative to a known starting point. However, IMUs are subject to errors such as bias, scale factor errors, noise, and drift, which accumulate over time and must be corrected or bounded using additional sensors or algorithms.
In automotive and robotics applications, IMUs are often fused with GNSS and other sensors (e.g., wheel odometry, vision) to provide robust, continuous, and high-integrity positioning. Key performance metrics for IMUs include bias instability, noise density, scale factor error, cross-axis sensitivity, bandwidth, and output data rate. For safety-critical applications, IMUs may need to meet specific functional safety standards (e.g., ISO 26262 ASIL B/D) and provide diagnostic outputs such as error events or out-of-range indications.