









The future of autonomy depends on the integration of highly accurate sensors for precise navigation. Once a distant concept, autonomous systems are now actively operating on our streets and in our neighborhoods. However, despite their growing presence, these vehicles still face technological challenges, particularly when confronted with ambiguity or unexpected scenarios. Overcoming these obstacles requires enhancing sensor fusion within the autonomous sensor suite, enabling the system to compensate for the limitations of individual sensors and operate more reliably in complex environments.
What is the Autonomous Sensor Suite?
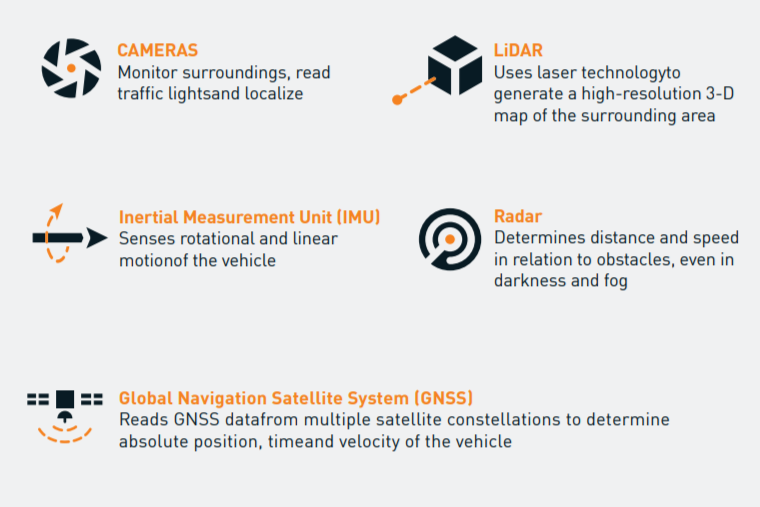
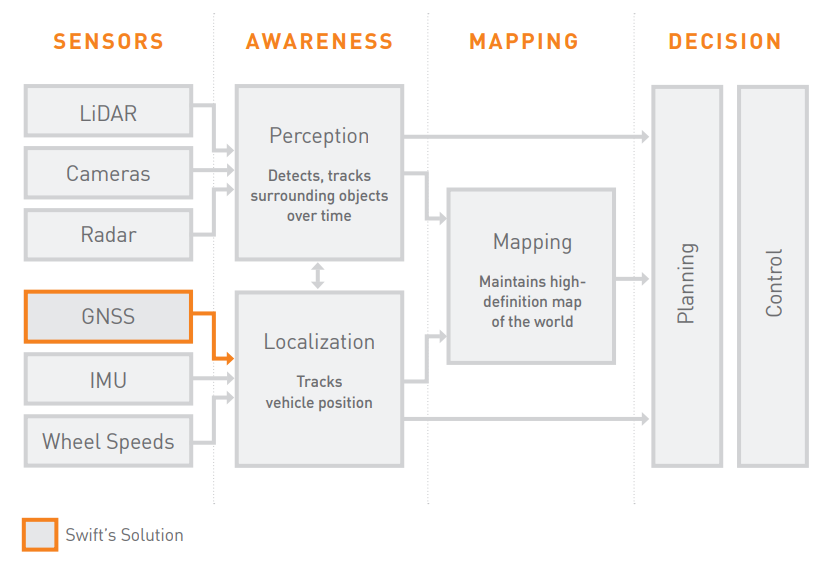
The autonomous sensor suite typically includes a combination of sensors such as cameras, LiDAR, radar, inertial measurement units (IMUs), and global navigation satellite systems (GNSS), that work together to give the vehicle an accurate picture of its surroundings. The data from these sensors is used to make reliable, real-time decisions that help ensure safer autonomous driving. While these technologies support relative positioning and navigation, many fall short in meeting the cost, accuracy, robustness, and size requirements needed for widespread adoption of autonomous systems.
When do Autonomous Sensors Fail?
Optical sensors like LiDAR and cameras, commonly used for relative positioning in autonomous vehicles, struggle in adverse weather conditions such as rain, fog, and snow. Although LiDAR is a leading technology in autonomous driving, it is costly and challenging to scale for mass production. Infrared sensors, which detect heat differentials, are less widely used and can be impacted by extreme temperature variations.
Heading sensors like magnetometers are vulnerable to magnetic interference, while gyroscopes suffer from drift and require regular calibration. Gyrocompasses provide True North orientation but are bulky and expensive, making them impractical for large-scale adoption. Magnetic compasses, which identify magnetic north, are also prone to interference. Inertial measurement units (IMUs) face issues like bias, latency errors, and sensitivity to vibrations, which can lead to drift during motion. Once a vehicle stops, positioning errors can accumulate, rendering the relative positioning and heading solutions no longer accurate. These sensors are not sufficient on their own to meet the needs of autonomous systems while others, such as ring laser gyroscopes, are too cost-prohibitive in mass market applications.
Why is GNSS a Crucial Sensor for Autonomous Navigation?
GNSS is a vital sensor for autonomous navigation because it is immune to magnetic interference and functions in static environments without requiring movement for calibration. Unlike other systems, Real-Time Kinematic (RTK) GNSS provides instant, high-precision heading without the need for motion, ensuring reliable positioning even when the vehicle is stationary. GNSS is unique in that it delivers the high integrity needed for Advanced Driver Assistance Systems (ADAS) to trust the accuracy of the position and velocity data. These characteristics, along with their affordable cost, make RTK GNSS sensors an ideal technology for applications that require precise relative positioning and robust precision heading.
Swift Navigation’s Automotive Solution
Swift has evolved its expertise in RTK GNSS to create Skylark, a one-of-a-kind cloud-based GNSS corrections network that delivers the benefits of RTK while eliminating the complexity of deploying and maintaining GNSS networks. As well as Starling, a high-precision positioning engine designed for automotive applications that require centimeter or decimeter accuracy using GNSS and dead reckoning sensor fusion. Skylark runs on a modern cloud software stack, based on data collected from Swift’s network of carrier-grade GNSS reference stations around the globe. By moving the service to the cloud, Skylark creates a platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity. Skylark offers a plug-and-play user experience that delivers fast convergence times measured in seconds, not minutes. It uses cutting-edge positioning algorithms to provide a continuous stream of data to individual devices from the cloud. This data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments.
Skylark eliminates the complexity of deploying and maintaining a traditional radio-connected base station and rover GNSS network by providing a connected GNSS solution that overcomes the accuracy limitations historically hindering adoption in autonomous localization. It offers a scalable, secure, and highly available cloud-based service that continuously streams real-time correction data. Skylark is ISO 26262 certified, ensuring safety and reliability, and offers full contiguous U.S. (CONUS) coverage. Uniquely designed from the ground up to support next-generation GNSS applications, Skylark is the only positioning network tailored for connected cars, V2X, and advanced driver assistance systems (ADAS), making it a key enabler of precise and reliable autonomous navigation.
Read about Skylark becoming the first real-time cloud-based service to achieve ISO 26262 certification.
Learn more about Swift’s end-to-end automotive localization solution.