Pseudorange is a fundamental measurement in GNSS positioning. It represents the apparent distance between a GNSS satellite and a receiver, calculated by measuring the time it takes for a satellite signal to travel from the satellite to the receiver, multiplied by the speed of light. The term “pseudo” is used because this measurement includes not only the true geometric distance but also various sources of error, such as satellite and receiver clock offsets, atmospheric delays (ionospheric and tropospheric), and other biases.
In practice, the pseudorange is determined by comparing the time of signal transmission (as encoded in the satellite’s message) with the time of reception (according to the receiver’s clock). Since both clocks are not perfectly synchronized, the resulting value is not a true range but a “pseudorange.” GNSS receivers use pseudorange measurements from at least four satellites to solve for their three-dimensional position and clock bias. The accuracy of the position estimate depends on the precision of the pseudorange measurements and the ability to correct for errors.
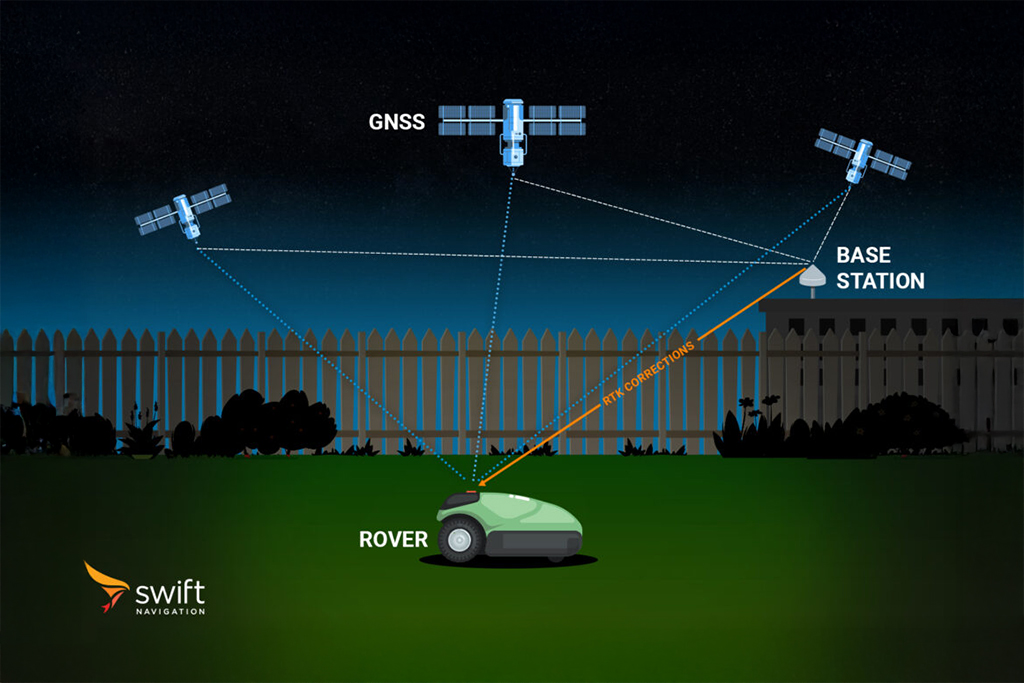
Pseudorange is distinct from carrier-phase measurements, which are used for higher-precision applications like Real-Time Kinematic (RTK) positioning. Pseudorange is essential for standard navigation, initial position fixes, and as an input to more advanced positioning algorithms