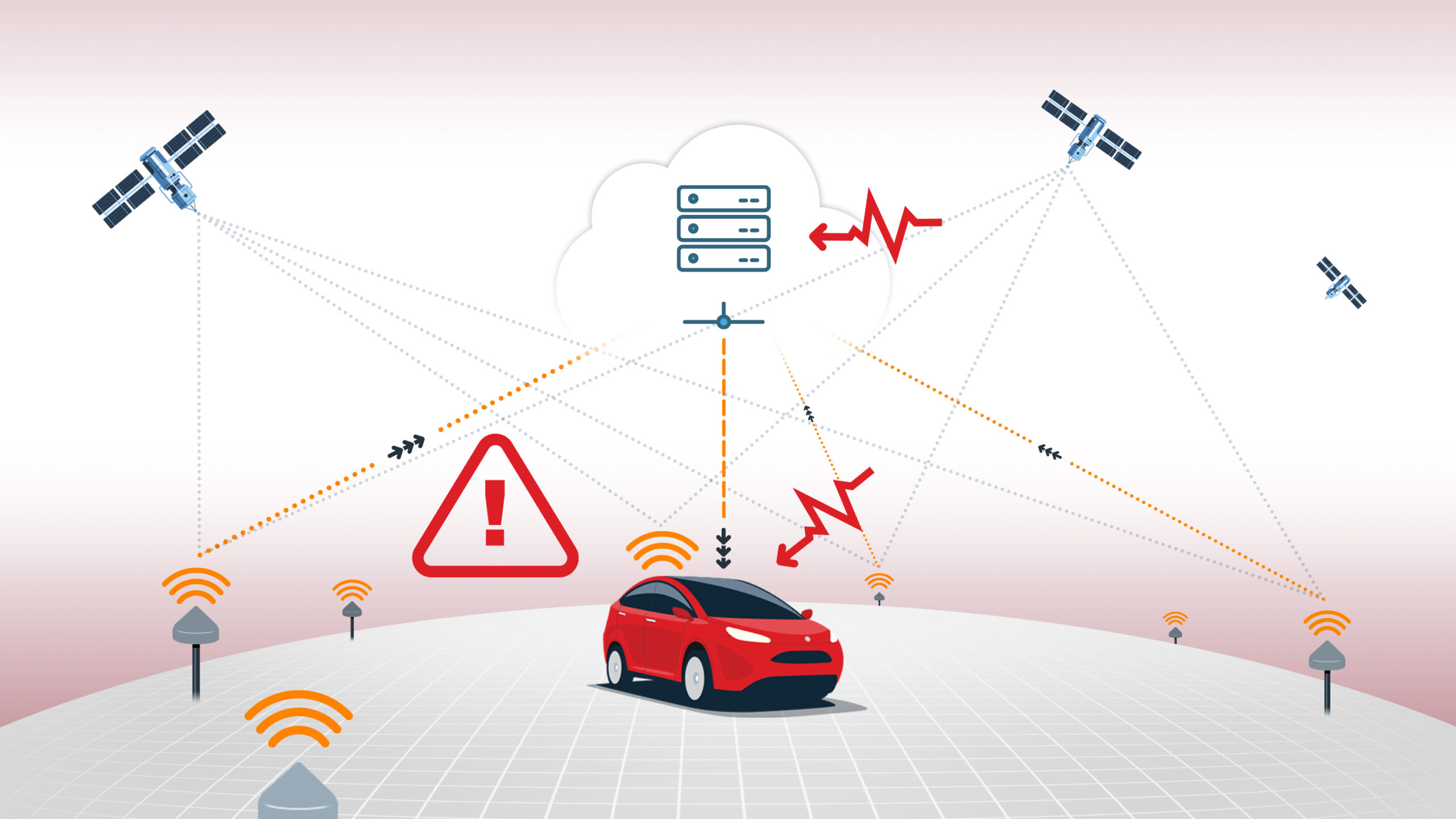
Wheel odometry refers to the process of measuring how far a vehicle has traveled by counting the rotations or “ticks” of its wheels. This is typically achieved using wheel speed sensors or pulse signals from the vehicle’s anti-lock braking system (ABS). Wheel odometry provides direct measurements of distance traveled and is especially valuable in environments where GNSS signals are unreliable or unavailable, such as tunnels or urban canyons.
In advanced navigation systems, wheel odometry data is fused with inertial measurement unit (IMU) data and GNSS to constrain velocity and reduce position drift, enhancing overall accuracy and robustness. Wheel odometry can be integrated via discrete pulse inputs, Hall-effect sensors, quadrature encoders, or CAN bus messages. It is a critical input for dead reckoning algorithms in automotive and robotics applications, helping maintain accurate position estimates during GNSS outages and supporting features like lane-level navigation and precise motion detection.