Skylark GNSS Corrections Deliver Centimeter-Level Accuracy Across South Korea’s Road Network
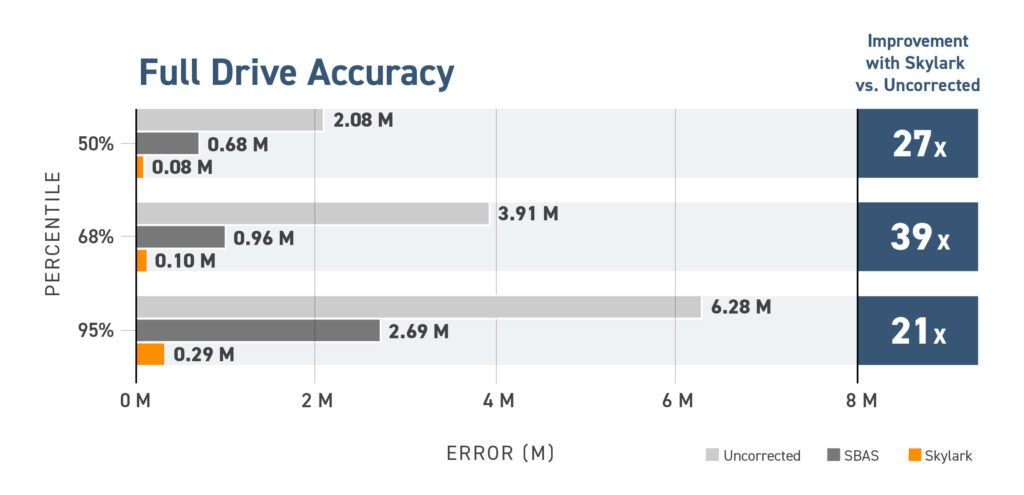
Swift Navigation partnered with Korea Telecom (KT) to evaluate the performance of its Skylark™ Precise Positioning Service across a 2,526 km drive spanning cities, highways, tunnels, and mountains. The test, conducted in February 2025, validated the benefits of cloud-based GNSS corrections in Korea’s complex driving environments, delivering highly precise positioning for automotive-grade applications. The results confirmed Skylark’s ability to significantly improve positioning accuracy, achieving a 21x better result than uncorrected GNSS across the entire test, reducing error from 6.28 m to 29 cm.
Why Precise Positioning Is Critical for Autonomous Navigation
Advancements in connected and autonomous vehicle technology are reshaping the automotive industry, driving safer, more efficient mobility solutions. Today’s vehicles are equipped with precise navigation, real-time HD maps, Advanced Driver Assistance Systems (ADAS), and Vehicle-to-Everything (V2X) communication, continuously progressing towards greater levels of autonomy.
To enable these capabilities, vehicles require a robust positioning system that integrates multiple sensors, including radar, cameras, LiDAR, inertial sensors, and GNSS. While traditional ADAS primarily relied on perception-based sensors, GNSS is now playing an increasingly larger role to expand operating environments and enhance safety and reliability. Perception sensors, such as LiDAR and cameras, offer incredibly precise localization in feature-rich areas with detailed HD maps, but they have shortcomings in poor weather, limited visibility, or when relying solely on “seeing” physical features.
GNSS, on the other hand, excels where perception-based sensors struggle, such as in feature-sparse environments or low-visibility weather conditions. Furthermore, GNSS maintains its precision at higher velocities where the accuracy of perception-based localization systems can degrade. Its uncorrelated nature with perception sensors adds an extra layer of redundancy, enhancing the reliability and availability of autonomous systems.
Key Requirements for Modern Automotive Positioning
To support advanced autonomous functions, precise GNSS positioning solutions must meet stringent industry demands:
Reliable Accuracy: Lane-level precision, rapid convergence, and seamless availability across wide regions.
Guaranteed Safety: Compliance with ASIL (Automotive Safety Integrity Level) standards for functional safety, ensuring rigorous trust and performance requirements are met.
System Interoperability: Compatibility with diverse automotive-grade GNSS receivers, sensor stacks, and compute platforms to ensure seamless integration.
Skylark meets and exceeds these requirements, delivering ASIL-certified absolute positioning as part of an end-to-end positioning solution with advanced sensor fusion—or as an interoperable component of any automotive tech stack. Designed from the ground up to enhance ADAS, autonomy, and V2X applications, Skylark is the first and only cloud-based positioning service to achieve ISO 26262 certification. Unlike other GNSS corrections services, which are hosted in physical data centers, Skylark’s cloud architecture enables mass market scale at an affordable price point.
Skylark Helps Overcome Challenges in Autonomous Vehicle Development
Automotive OEMs and Tier 1 suppliers face three critical challenges when developing autonomous systems: high system and sensor costs, limited scalability, and complex integration with existing technology. Skylark addresses these challenges by providing a solution that reduces costs, scales seamlessly, and integrates effortlessly into existing automotive ecosystems.
Challenge 1: High System Costs Developing autonomous systems often requires expensive sensors, HD maps, and high-performance compute. Skylark reduces these costs by eliminating dependence on physical data centers, minimizing reliance on expensive LiDAR and SLAM sensors, and enabling dynamic HD map updates with real-time positioning—cutting the need for expensive, frequent refresh cycles.
Challenge 2: Limited Scalability Scaling from Level 0 driver assistance to Level 5 autonomy requires global coverage and flexible architecture. Skylark’s AWS-backed, cloud-native corrections scale seamlessly across continents, delivering high-integrity, safety-certified positioning without the need for dense local base station infrastructure.
Challenge 3: Complex Integration Integrating new tech into existing automotive stacks can be costly and slow. Skylark is software-based, sensor-, hardware-, and OS-agnostic, accelerating integration timelines and ensuring OEMs can evolve with changing regulations and industry standards.
By addressing these challenges, Skylark empowers OEMs and suppliers to reduce costs, scale globally, and future-proof their autonomy strategies.
Swift Navigation Precise Positioning
Designed to meet the strict requirements of automotive deployments, Swift’s Automotive Suite delivers a complete software solution for precise vehicle localization. Swift’s Automotive Suite includes:
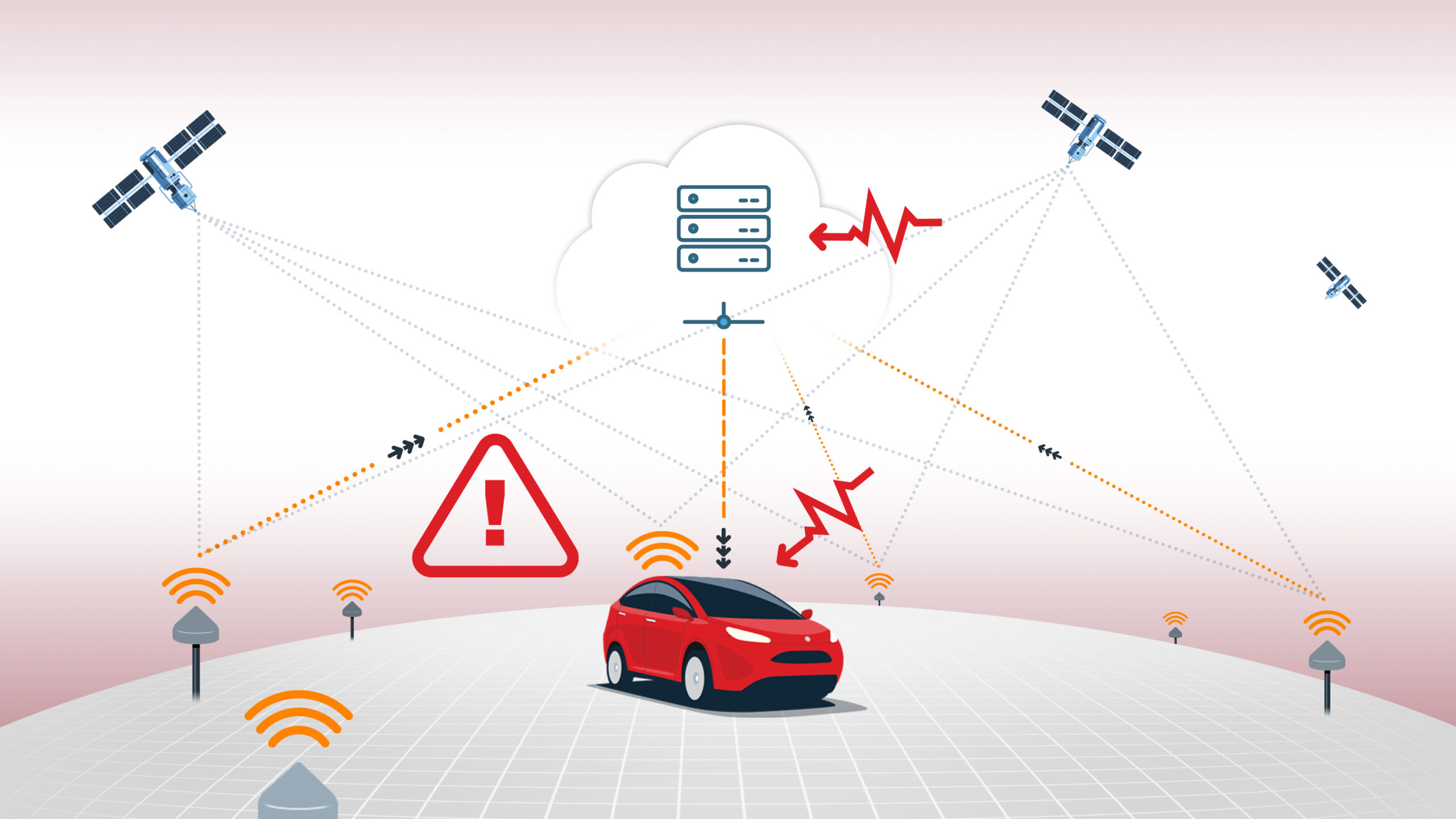
Skylark Precise Positioning Service: Skylark Cx is a real-time, cloud-based PPP-RTK correction service that delivers highly accurate, highly reliable, positioning across large-scale regions.
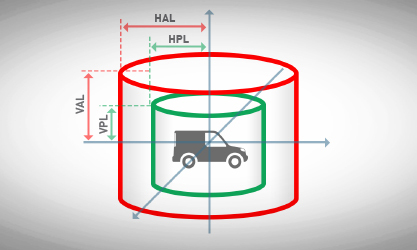
Skylark comes with an Integrity option that enables functional safety compliance by delivering trusted positioning data with quantifiable confidence levels. This option is built on a robust integrity framework that continuously monitors for feared events—such as satellite faults, atmospheric anomalies, and station outages—and flags suspect measurements in real time. Designed to support ASIL-rated systems, it ensures that safety-critical applications have highly trustworthy location data and timely alerts when confidence falls below defined thresholds.
Starling Positioning Engine: A high-precision, hardware-agnostic software positioning engine that fuses GNSS data with inertial sensors and other sensor inputs to deliver reliable, absolute positioning. When integrated with Skylark, it forms an end-to-end, ASIL-compliant localization solution for autonomous and connected vehicles.
Testing Skylark GNSS Corrections on Korean Roads
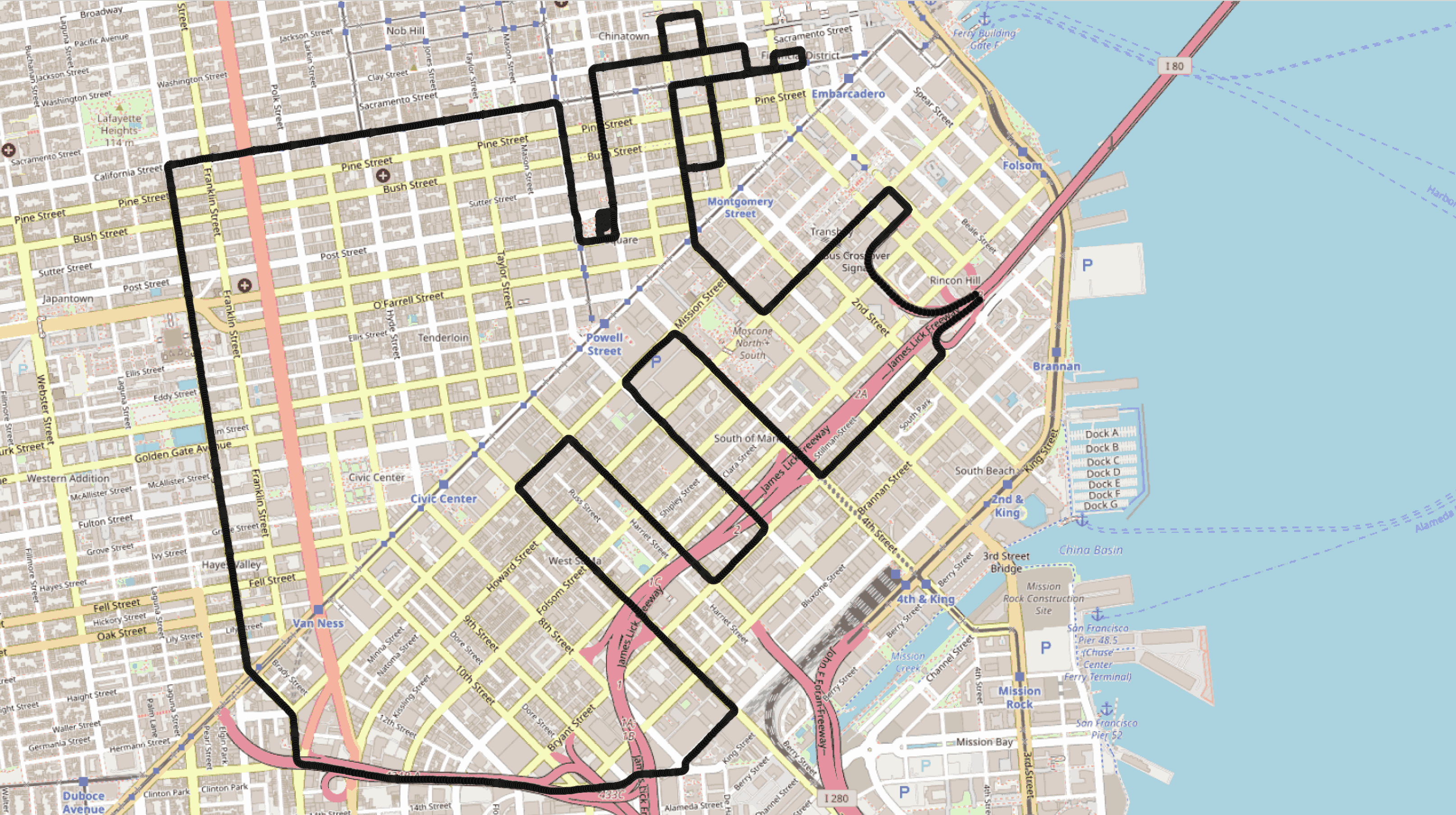
Swift Navigation, in partnership with Korea Telecom, conducted a four-day drive test across 2,526 km of Korea’s major road networks, spanning diverse environments, including urban areas, mountains, expressways, and tunnels. The test vehicle was outfitted with:
A high-end reference system consisting of two survey grade antennas supporting L1/L2 and L1/L5 GNSS frequencies, connected to a ground truth system.
An STMicroelectronics Teseo V automotive-grade dual-band GNSS receiver, capable of outputting Skylark-corrected, SBAS-corrected and uncorrected positions.
A Wheel Odometry interface and Inertial Navigation System (INS) integrated with Starling Positioning Engine’s dead reckoning to enhance all three positioning methods.
LTE connectivity for real-time delivery of NTRIP GNSS corrections via Korea Telecom’s network.
The route covered many environments where precise positioning for ADAS and autonomous navigation often struggle:
Urban canyons and dense city centers where multipath deteriorates performance.
Multi-lane highways and toll booths where lane-level positioning is crucial for high-stakes maneuvers.
Tunnels, overpasses and mountainous terrain where GNSS signals can be partially or fully obscured.
A Note On SBAS
Satellite-Based Augmentation Systems (SBAS), such as KASS in Korea and WAAS in the United States, are regional satellite systems that provide augmentation to standard GNSS by leveraging a network of ground-based reference stations to monitor satellite signals for errors. Corrections are computed at a central facility and then broadcast to SBAS-enabled receivers via geostationary satellites, facilitating wide-area coverage.
SBAS was designed to support aircraft GNSS positioning, with much higher error tolerance and unhindered skyview. SBAS corrections are much more coarse than PPP-RTK corrections, as they are designed to apply over large geographic regions rather than being tailored to localized environments, and typically offer an accuracy within 1 to 3 meters. Receiving SBAS corrections also requires line of sight with geostationary satellites, which may be low above the horizon in northern or southern latitudes. This can limit the effectiveness of SBAS in environments where obstacles such as buildings, trees, or rugged terrain obstruct the signal.
As such, SBAS is limited in its ability to meet the stringent demands of advanced driver assistance systems (ADAS), autonomous driving, and lane-level positioning. We included SBAS in our analysis because it is widely supported by GNSS receivers and freely available, making it a common baseline for comparison.
Skylark GNSS Corrections Improve Positioning Accuracy by 21x
Skylark improved GNSS accuracy from 6.28 meters to just 29 cm across Korea’s varied road environments, a 21x improvement over uncorrected GNSS throughout the full drive. This performance confirms Skylark’s ability to exceed current automotive positioning methods.
In dense urban areas and tunnels, Skylark delivered 16 cm accuracy, enabling a seamless handoff to Starling’s dead reckoning and maintaining precision through GNSS outages, with an RTK fix reacquired in just 8 seconds.
In multi-lane roads, toll gates, and highway exits, Skylark achieved 11-13 cm accuracy, ensuring correct lane detection, safe maneuvers, and reliable automated tolling.
Testing Skylark in Challenging Conditions
Highlighted Environment: Urban Canyons
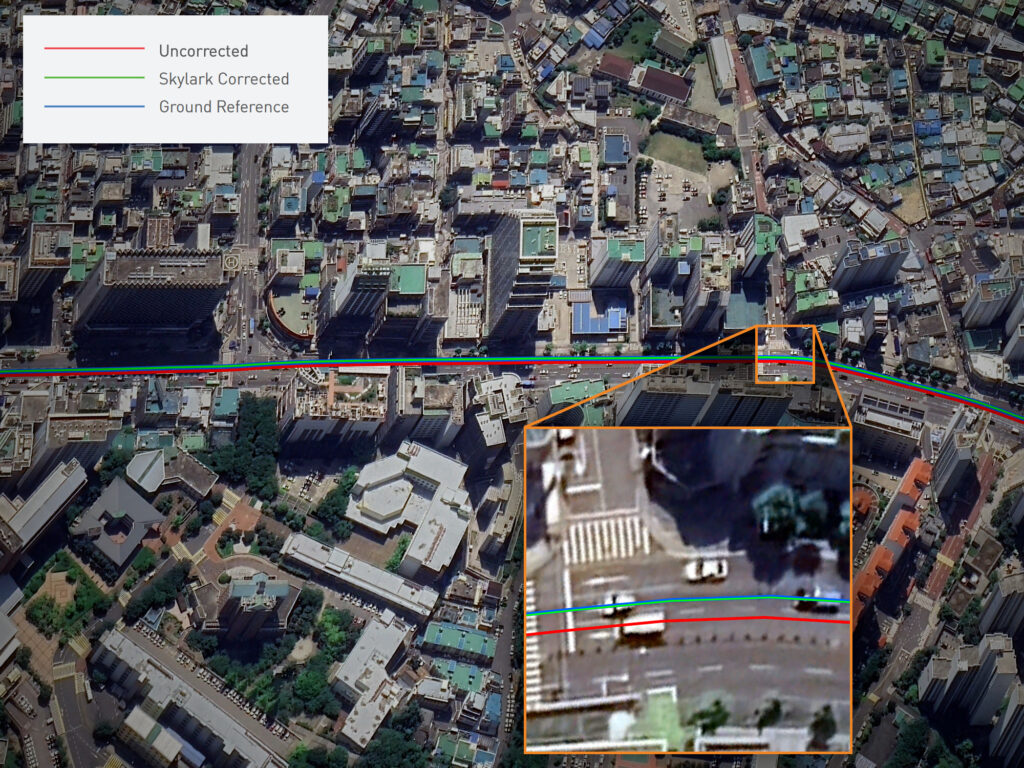
Urban areas in Korea present significant challenges for GNSS-based positioning due to high-rise buildings, stacked highways, and dense infrastructure, which cause multipath errors, signal reflection and blockage. Multipath occurs when satellite signals reflect off nearby surfaces—such as buildings or vehicles—before reaching the receiver, leading to signal delays, sudden position jumps, and inaccurate location data. In urban canyons, where streets are flanked by high-rises, this effect is particularly severe, often creating large positioning errors and making navigation unreliable.
Uncorrected GNSS shows the vehicle in the wrong lane, whereas when using Skylark, the position matches that of the Ground Reference.
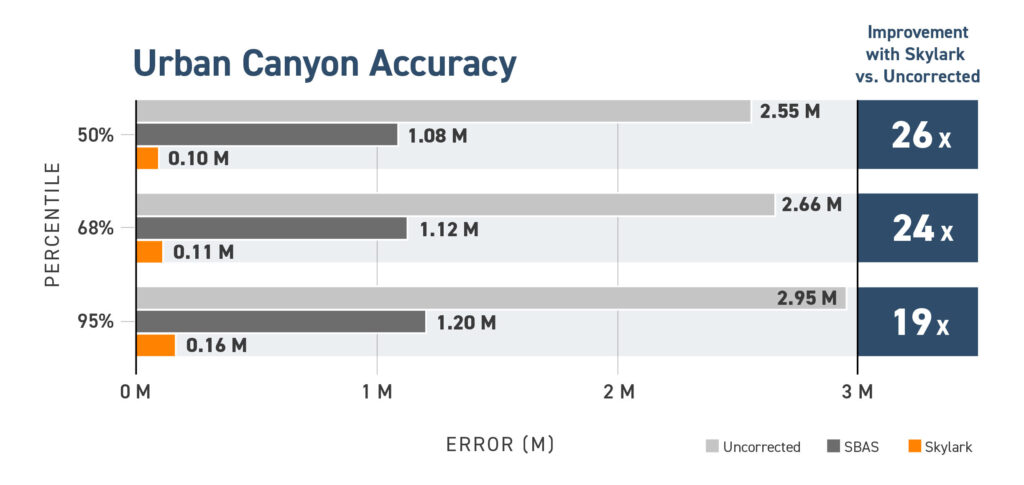
By ingesting Skylark corrections, accuracy improved 19x at the 95th percentile, from over 2.9 meters to just 16 cm, ensuring precise and stable navigation even in the most challenging city landscapes. When combined with a sensor fusion-enabled positioning engine, such as Starling, Skylark eliminates sudden position jumps, allowing ADAS applications to function with unparalleled reliability from the moment the vehicle starts moving.
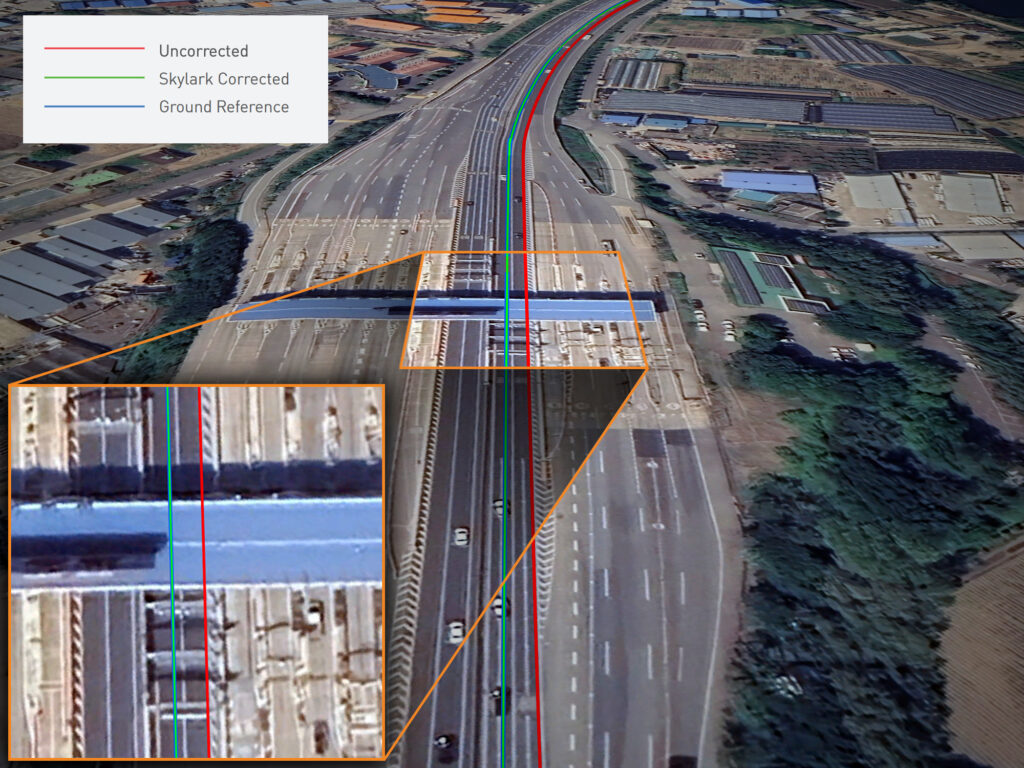
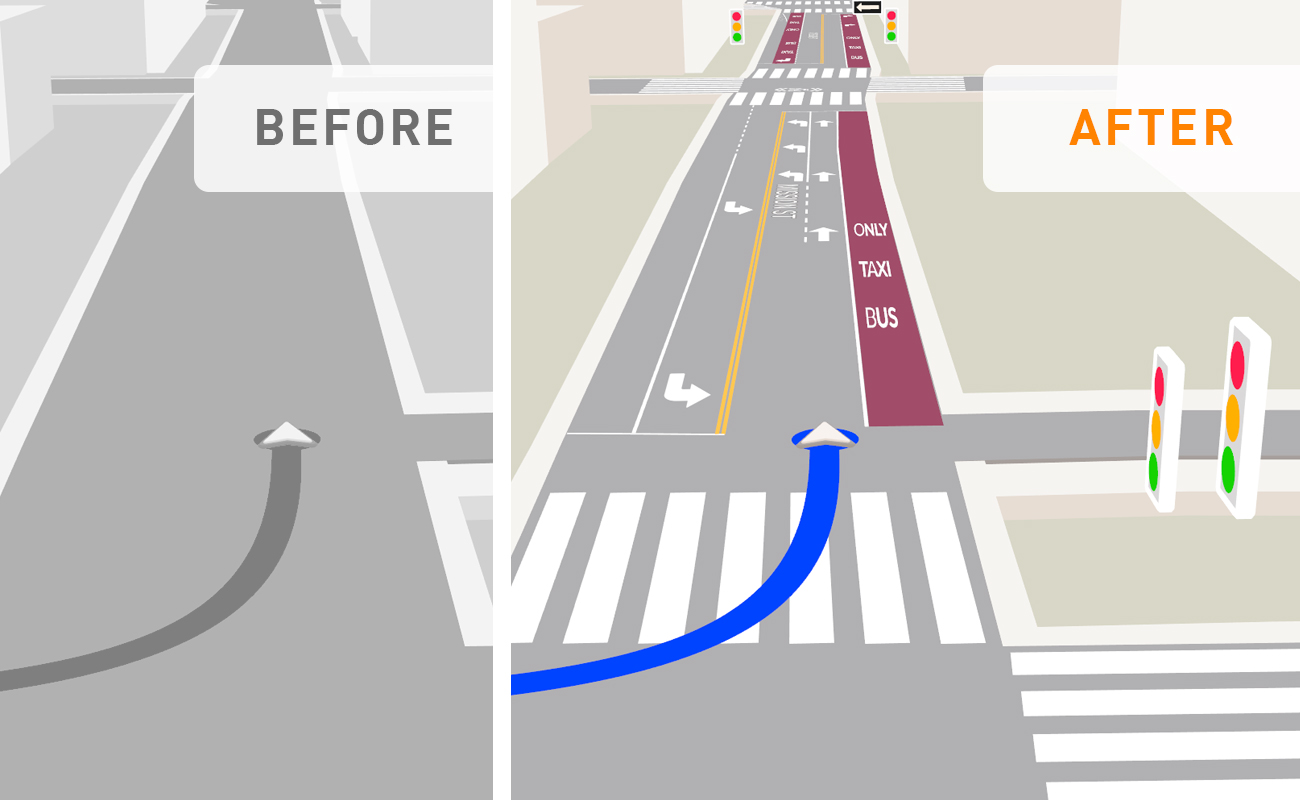
Highlighted Environment: Multi-Lane Roads
Accurate positioning on highways and at complex intersections is critical for ADAS and autonomous systems, where even small errors can lead to incorrect lane identification and navigation failures. For Level 2+ ADAS applications, high-precision lane positioning is especially essential in urban and suburban environments. In South Korea, where highways have a dense network of toll booths, lane-level accuracy is also crucial for automated tolling systems. Features such as red light violation warnings depend on the vehicle’s ability to match its exact lane position to traffic signal data. Global fleet operators lose millions annually due to tolling errors and fuel fraud caused by imprecise positioning.
Skylark precisely positions the vehicle in the correct lane, preventing mischarges. At toll plazas in Korea, lanes (and their associated tolls) are assigned to specific vehicle classes, so using uncorrected GNSS can result in incorrect automated charges.
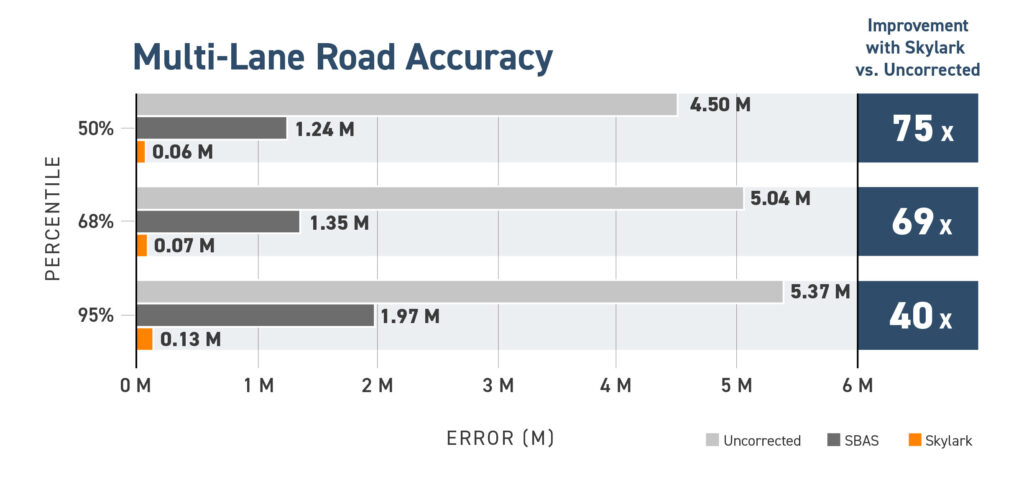
With Skylark, GNSS accuracy on highways is enhanced 40x—from 5.4 meters to 13 cm—enabling advanced safety features and seamless navigation in complex road environments. Even after passing through toll booths, where GNSS signals are often temporarily lost, Skylark re-establishes an RTK fix in just 5 seconds, ensuring continuous high-accuracy positioning for autonomous and ADAS-equipped vehicles. Skylark ensures vehicles are correctly identified at toll booths, eliminating mischarges and enabling frictionless automated payments, making tolling more efficient for both operators and drivers.
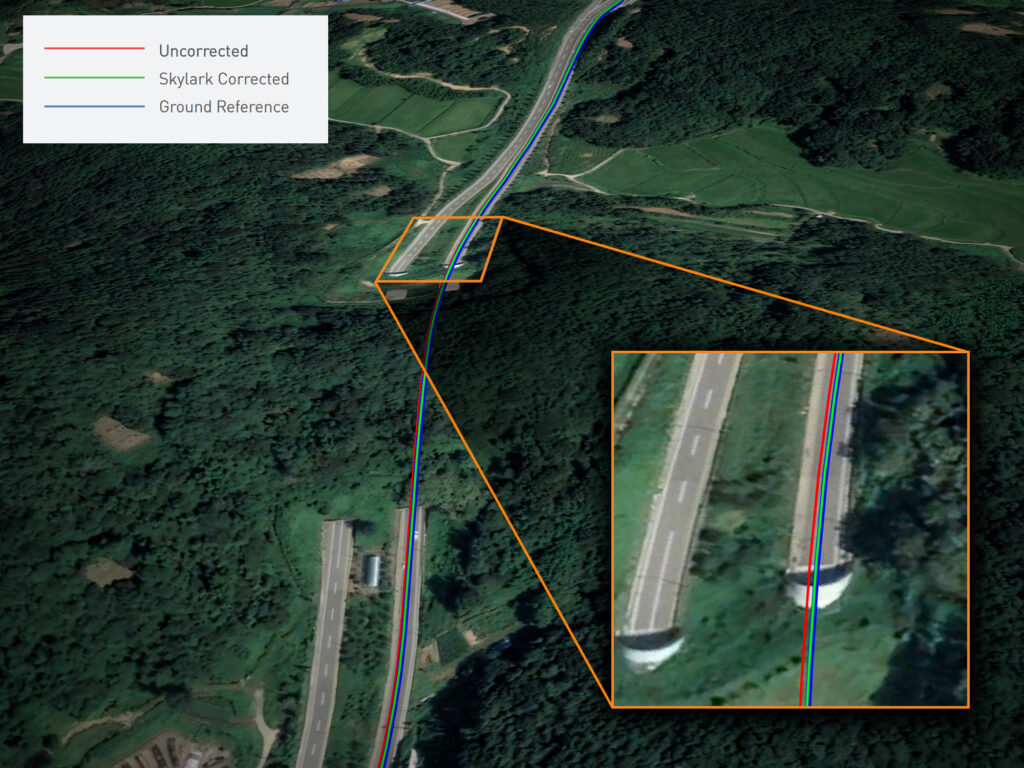
Highlighted Environment: Tunnels
Approximately 65% of the Korean peninsula is mountainous. This terrain has resulted in there being over 1500 registered road tunnels, some of which exceed 2 km in length. Consequently, the drive test encountered instances of complete GNSS signal loss in these subterranean passages, requiring dead reckoning to maintain positioning. Dead reckoning is a navigation method that estimates a device’s current position by applying velocity and bearing information, acquired from relative sensors such as wheel odometry and INS, to the vehicle’s last known position.
Skylark maintained lane-level accuracy even when in GNSS-denied environments.
Due to the shared test architecture, all three positioning solutions benefited from dead reckoning to sustain position through signal outages. The benefit of Skylark in this GNSS-denied environment was that it delivered a precise RTK fix to the positioning engine just before tunnel entry, enabling dead reckoning to maintain a highly accurate trajectory through the entirety of the tunnel.
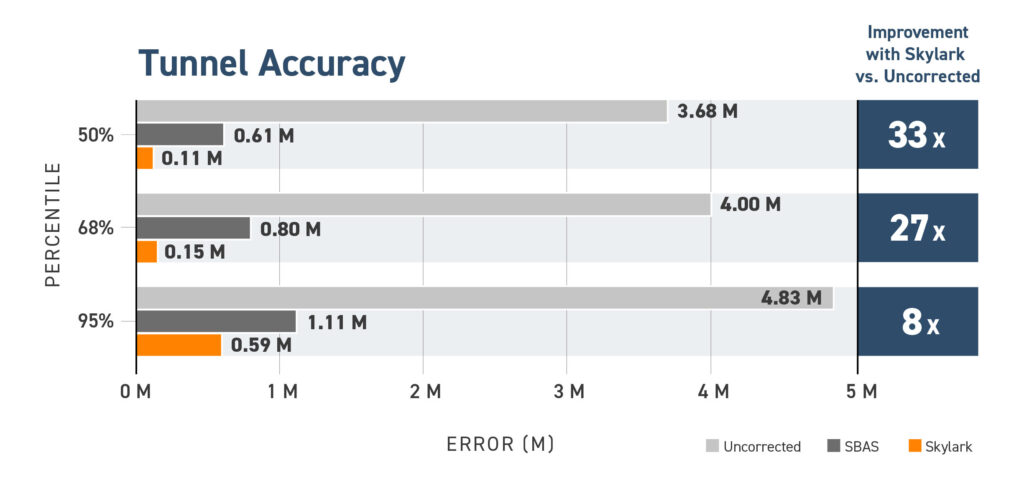
Starling displayed short re-convergence time upon exiting tunnels, transitioning from dead reckoning to an RTK fix in just 8 seconds. Skylark drastically improved accuracy in this GNSS constrained environment from 4.83 meters to 59 cm at the 95th percentile.
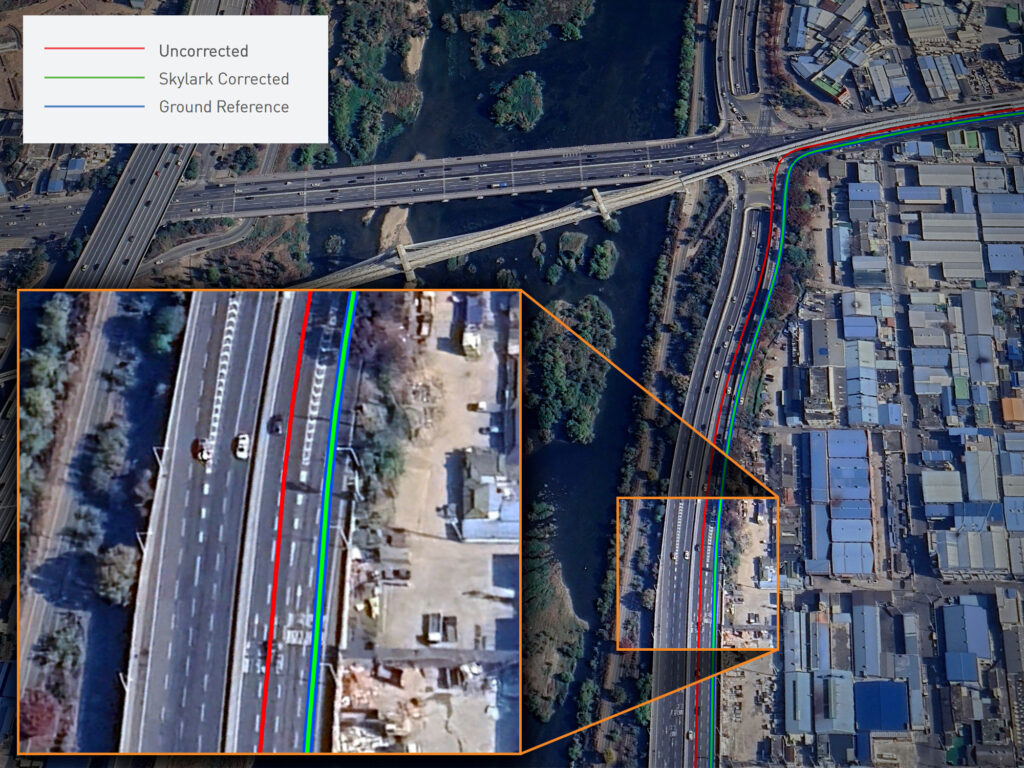
Highlighted Environment: Highway Exits
Precise positioning is critical at highway exits, where vehicles must accurately distinguish between adjacent lanes and determine whether they’ve committed to an off-ramp or continued on the main carriageway. The importance of precise positioning is compounded by the fact that highways often pass through urban environments and underpasses, where GNSS signals can be blocked and multipath effects can introduce positioning errors. Even minor errors in localization can result in incorrect lane identification, missed turns, or unsafe maneuvers, making high-integrity GNSS performance essential for safe navigation in these complex scenarios.
Skylark accurately positions the vehicle in the departing lane, while uncorrected GNSS still shows it on the highway. This level of inaccuracy is insufficient for ADAS and autonomous driving applications, where precise lane-level positioning is critical for high-stakes maneuvers.
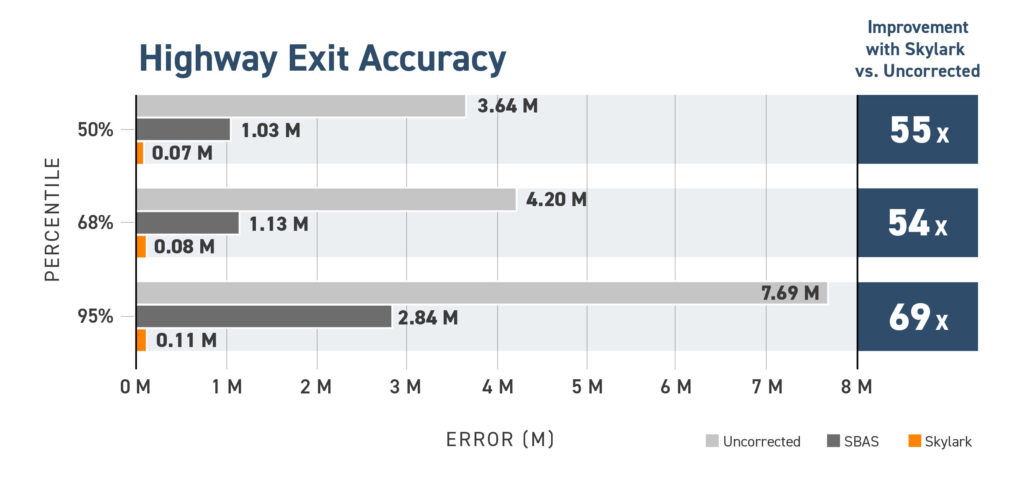
Skylark enhances accuracy from 7.69 meters to just 11 centimeters at the 95th percentile, a 69x improvement. This level of accuracy ensures vehicles stay in the correct lane and execute safe, timely maneuvers, while also enabling smoother transitions, earlier decision-making, and more effective coordination with ADAS features and path planning algorithms.
Cloud-Based GNSS Corrections Unlock the Future of Affordable Autonomy at Scale
Uncorrected GNSS is no longer sufficient for the demands of lane-level vehicle positioning, autonomous navigation, or real-time robotic control. As this Korea drive test demonstrates, Swift’s cloud-based GNSS correction service meets the rigorous accuracy, availability, and safety demands of modern mobility.
With over 10 million devices deployed worldwide, and partnerships across Asia, Europe, and North America, Swift Navigation and Korea Telecom are unlocking the full potential of GNSS cloud solutions in one of the world’s most advanced markets.
Want to integrate highly reliable GNSS corrections into your platform? Contact us today to get started.