





























































Free vs. Paid GNSS Correction Services
A technical guide for engineers, surveyors, and product teams evaluating free vs paid GNSS correction infrastructure.
How GNSS Corrections Are Powering Safer, Smarter Micromobility
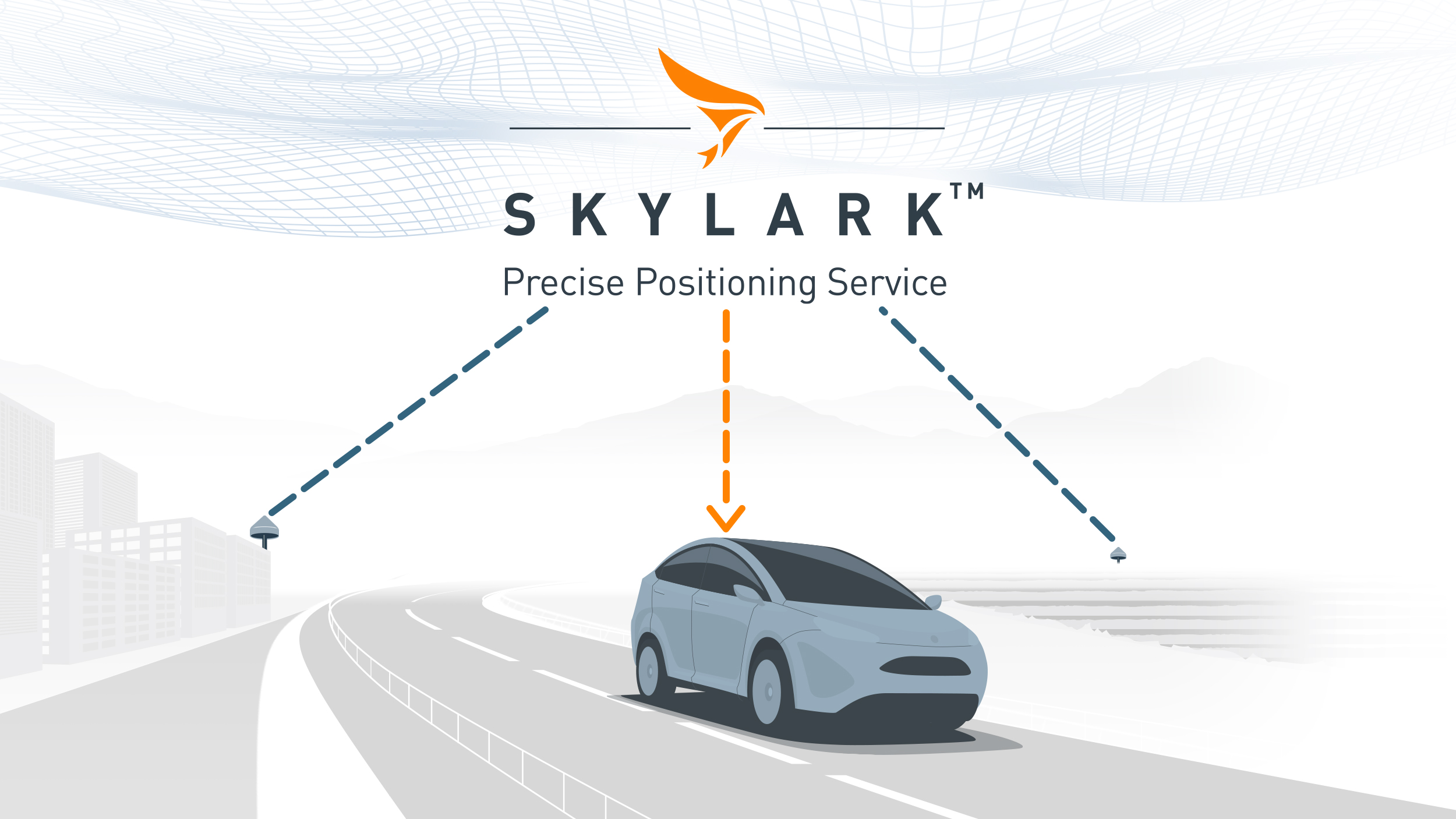
Micromobility is entering a new phase—moving beyond early adoption toward sustainable, scalable growth. As the market matures, operators are under increasing pressure to meet safety, compliance, and efficiency standards. High-precision GNSS correction services are emerging as a critical tool to meet these demands. To explore this shift, we spoke with Swift Navigation’s Jochen Bruns, who shares how cloud-based solutions like Skylark™ are helping fleet operators build smarter, more reliable micromobility systems.
Inside Skylark's Atmospheric Model
Reliable RTK positioning needs robust atmospheric modeling, not just dense networks. In this article, we look at how Skylark’s physics-based approach outperforms standard interpolation to deliver consistent, high-integrity corrections even during atmospheric disturbances. This ensures reliability for critical applications where traditional methods often fail.
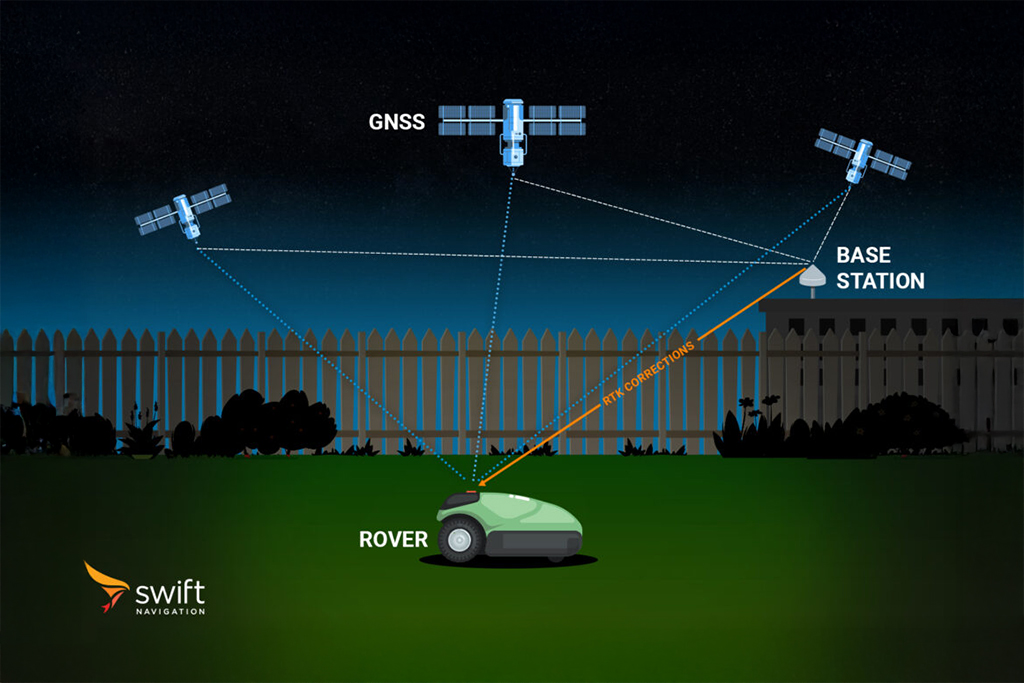
How Origin Forensics Maps Crash Sites with Skylark Nx RTK
By using Skylark Nx RTK and Emlid rovers, forensic consulting firm Origin Forensics has enhanced its crash reconstruction capabilities, enabling targeted data collection and survey-grade accuracy for high-stakes legal proceedings. This efficient, mobile solution allows the team to rapidly capture precise evidence even in challenging environments, ensuring robust data redundancy and superior field performance.
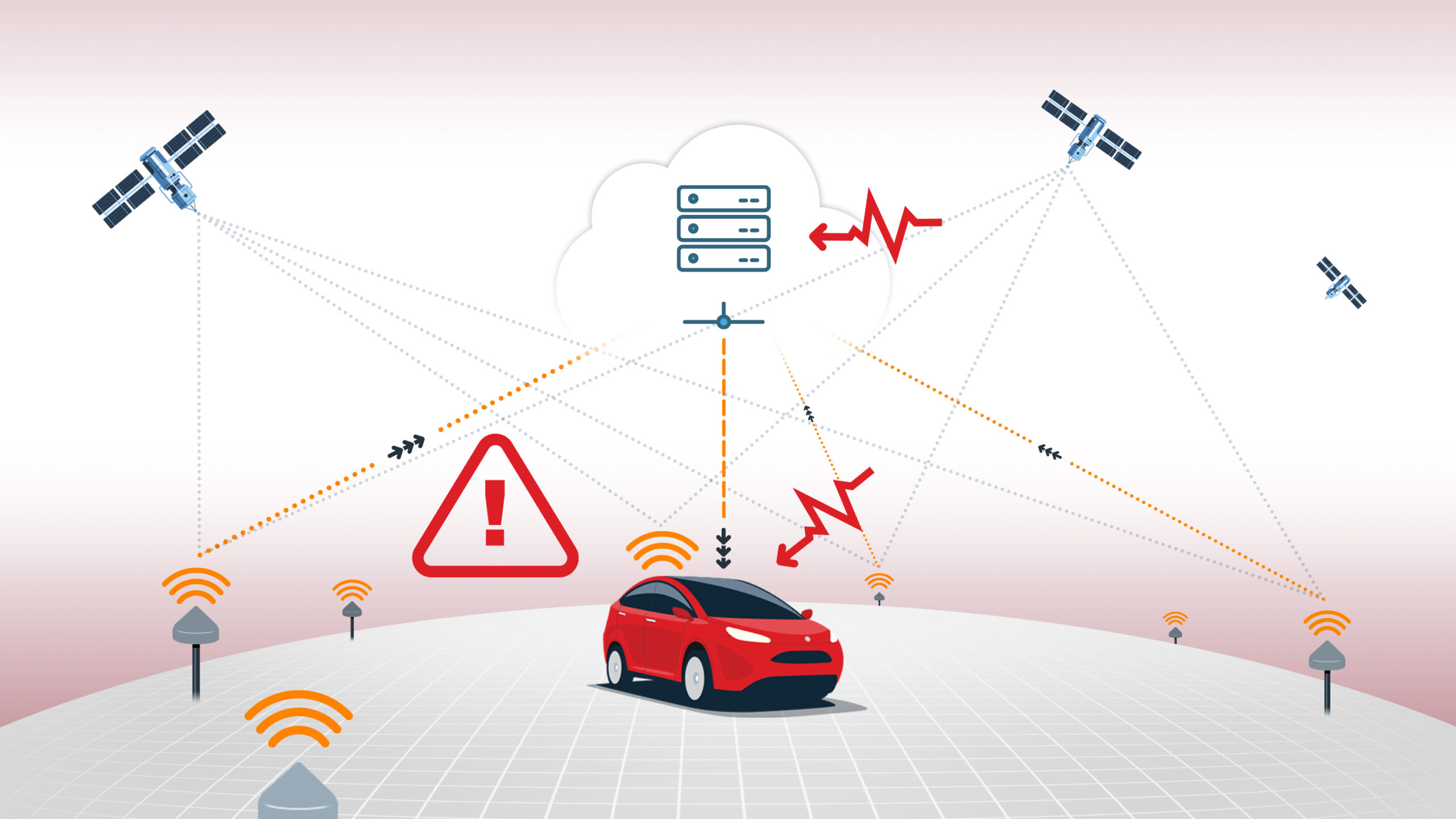
Beyond Vision: Why High-Integrity Precise Positioning Won Swift Navigation the AutoTech Award
We are thrilled to share that Swift Navigation was recently honored at the prestigious AutoTech Awards. This recognition validates a fundamental shift occurring within automotive engineering: the realization that vision-based perception systems alone cannot carry the full weight of future safety-critical automation. To build true consumer trust and unlock widespread Level 2+ and Level 3 autonomy, vehicles need an unshakeable digital fail-safe. Here is a deep dive into the technology, philosophy, and real-world results that caught the judges’ attention. The Safety Gap: Why Perception is Not Enough Modern Advanced Driver Assistance Systems (ADAS)—from lane-keep assist to automated emergency braking—have revolutionized passenger vehicle safety. However, these systems are fundamentally constrained by their reliance on visual and line-of-sight perception sensors like cameras, radar, and LiDAR. In real-world driving environments, visual perception faces inevitable edge cases: When these sensors fall short, the typical system behavior is an abrupt disengagement. This shifts situational ownership back to the driver instantly, often creating high-risk scenarios. Swift Navigation addresses this safety gap by introducing a high-integrity absolute localization layer. By serving as an unshakeable cloud-connected anchor, our technology ensures the vehicle always knows its exact position, even when visual sensors are completely blinded. The Three Pillars of
Essential Aero Uses Skylark to Enable Autonomous Airport Operations with Centimeter-Level Precision
Essential Aero is transforming airport ground operations by deploying autonomous robots for foreign object debris (FOD) collection, powered by Swift Navigation’s Skylark Nx RTK. This partnership provides the centimeter-level precision and geofencing required to enhance airfield safety and significantly reduce the $22 billion in annual costs associated with FOD damage.
How Vakaros and Swift Navigation are Modernizing Competitive Sailing
Traditional sailboat racing relies on human race officers to judge starts by eye, a method prone to blind spots and unverifiable decisions. To solve this, marine technology leader Vakaros developed RaceSense, a digital race management system that integrates Swift Navigation’s Skylark service to deliver the centimeter-level accuracy required for real-time tracking and automated officiating.
How Edge AI + Precise GPS Work Together
At NJ TransAction 2026, Dareesoft and Swift Navigation show how edge-based computer vision and precise GNSS work together to detect road issues like missing or damaged speed limit signs in real time. By anchoring AI detections to centimeter-level positioning, vehicles can generate accurate, reliable data without expensive mapping infrastructure, enabling a continuously updated view of the road network.

How Halo Collar Uses Skylark to Redefine Pet Safety
A dog isn’t just a pet; they’re a family member. And when it comes to family, ‘close enough’ isn’t enough. Halo Collar partnered with Swift Navigation to deliver the most accurate pet tracking collar that takes virtual fences to the next level. Independent testing shows that Precision+ delivers 3x more accuracy than any other GPS dog fence on the market.

Track-Level Precision: How Nexxiot Uses Skylark Maximize Rail Utilization and Safety
Managing tight, congested railyards requires precision that standard GPS cannot provide. Tracks are situated tightly to maximize usable space, but managing freight at the track level has technical barriers. Nexxiot partnered with Swift Navigation to deliver track-level location data, enabling operators to increase railcar utilization and improve worker safety.