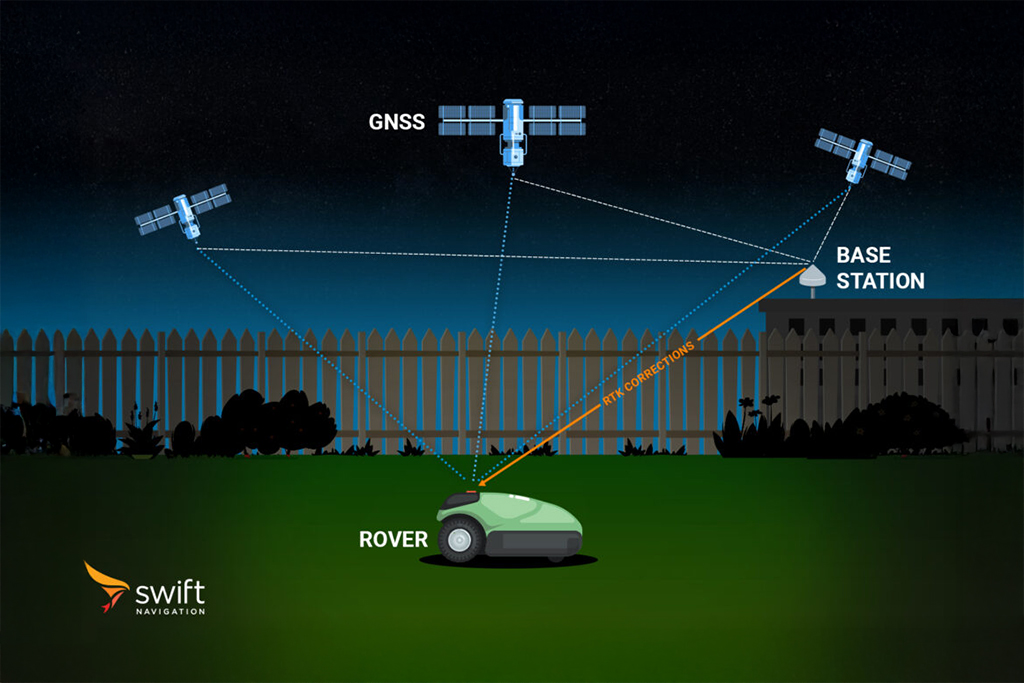
A single-base RTK station provides reliable centimetre accuracy within roughly 20–30 km. Beyond that, atmospheric errors decorrelate between the base and rover, degrading accuracy. Network RTK extends reliable centimetre coverage up to 70km, in the case of Skylark Nx RTK.