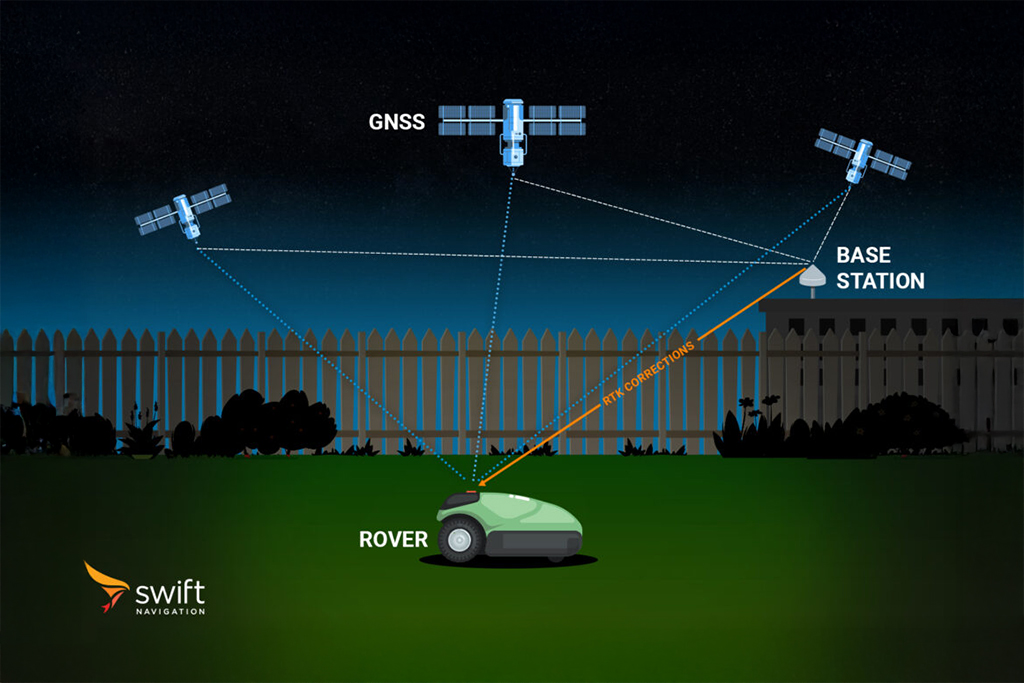
An RTK (Real-Time Kinematic) baseline is the vector distance between two GNSS receivers: a stationary base station and a mobile rover. In essence, it measures the separation between the known reference point and the unknown position you are trying to determine.
How Baselines Affect RTK Performance
Traditional single-baseline RTK relies on one reference station and one rover, and the length of the baseline is the most critical factor influencing accuracy:
Short Baselines (<10 km): Deliver the highest accuracy, often achieving 1–1.5 cm 2D precision (95% confidence). This is because GNSS signals to both receivers experience nearly identical atmospheric errors, which can be effectively canceled out.
Long Baselines (>30 km): As the baseline increases, atmospheric effects like ionospheric and tropospheric delays differ between receivers. These errors degrade accuracy and stability. A single-baseline RTK setup may struggle to maintain a fixed solution beyond ~30 km.
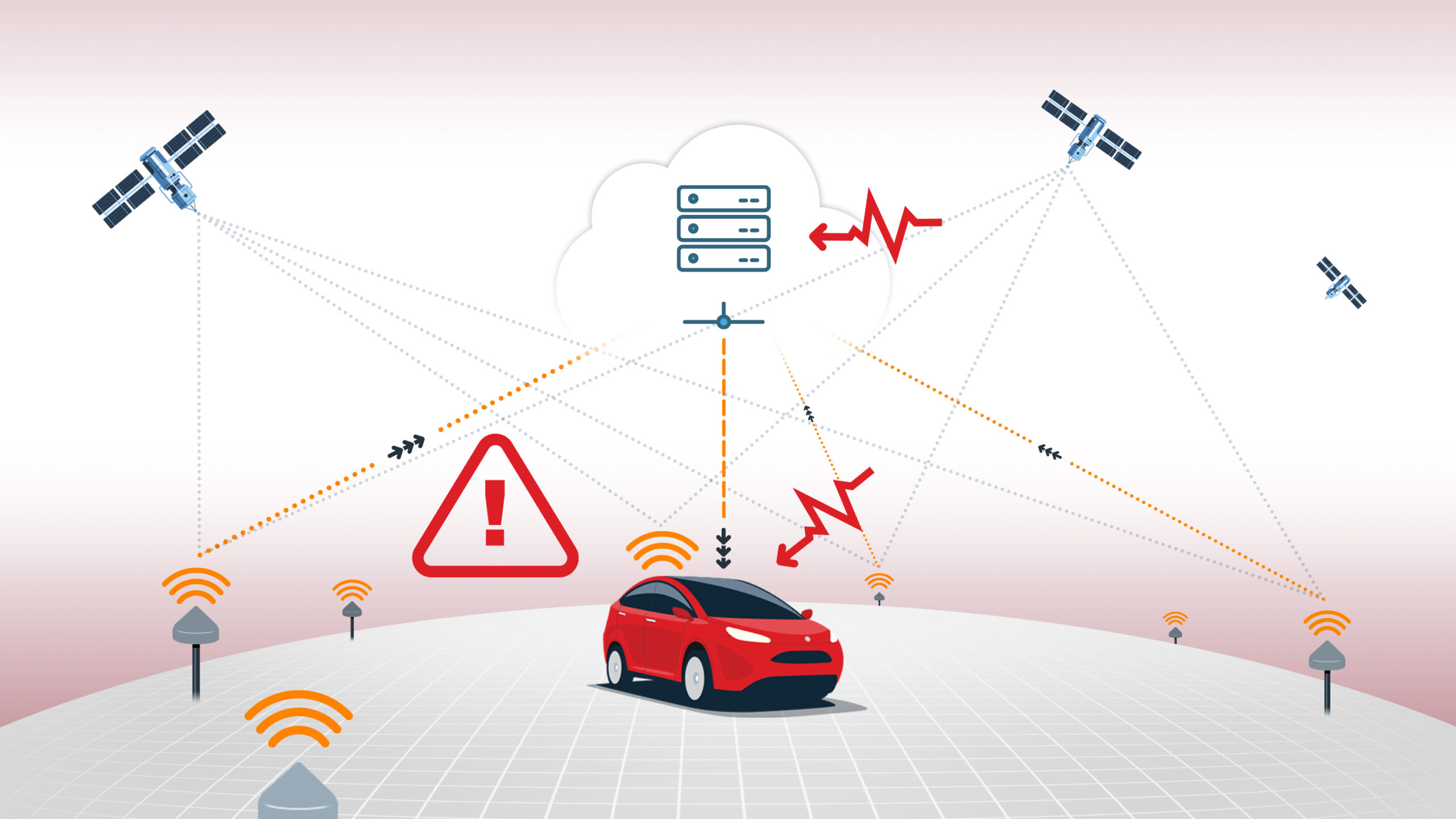
To overcome these limitations, network-based RTK approaches such as Network RTK and Virtual Reference Stations (VRS) extend the effective baseline:
Network RTK combines data from multiple reference stations to model atmospheric effects regionally, enabling centimeter-level accuracy up to 50–70 km.
VRS generates a “virtual” base station near the rover’s position, keeping the effective baseline short (often <10 km) even when physical station spacing is much larger.
These methods significantly extend RTK’s usable range compared to traditional single-base systems, maintaining accuracy and stability across wider areas.
How RTK Baselines are Measured
An RTK baseline is a vector, meaning it has both length and direction. It can be expressed in different coordinate systems:
ECEF (Earth-Centered, Earth-Fixed): Measures X, Y, and Z components of the vector from the base to the rover.
NED (North-East-Down): Measures the relative rover position on a local tangent plane.
Note: Some RTK systems may report a baseline that does not directly equal the physical distance between receivers.
Swift Navigation’s Approach
Swift Navigation extends the performance of RTK beyond the limits of single-baseline systems. Our Skylark™ Nx RTK atmospheric modeling technology supports effective baselines of up to 70 km with ~5 cm accuracy. This extended baseline reduces operational costs and enables affordable, wide-area coverage for reliable precise positioning at scale.